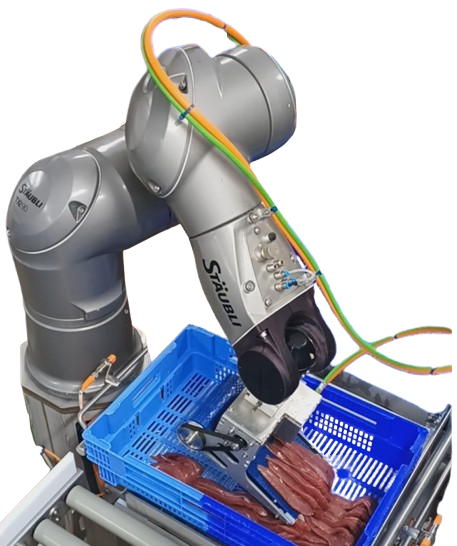
Robot Polyarticulé
Solution de Pick&place robotisée

robot sur mesure
Cellules robotisées sur mesure
Vendée Concept développe des cellules robotisées sur mesure pour automatiser des opérations de prise/dépose (pick & place) et de manipulation en industrie, avec un objectif simple : gagner en efficacité, en régularité et en disponibilité de production.
Ces cellules permettent de fiabiliser des gestes répétitifs, de maintenir une cadence constante et d’améliorer l’ergonomie, tout en réduisant les manutentions et les aléas liés aux variations de charge.
Configuration et intégration
Selon le besoin, nous intégrons des robots de tout type :
- Delta pour les applications très haute cadence (prise/dépose rapide, produits unitaires).
- SCARA pour des mouvements rapides et précis sur des trajectoires courtes, idéal pour l’assemblage et le transfert.
- Polyarticulé (6 axes) pour la flexibilité maximale (orientations complexes, prise multi-angles, environnements contraints).
Le choix de l’architecture robot est fait en fonction du produit, de la cadence, de l’encombrement et des contraintes d’intégration
Préhenseurs sur mesure et solutions brevetées
Nous concevons et réalisons des préhenseurs sur mesure adaptés au produit et aux contraintes du process.
Selon l’application, la préhension peut être mécanique (pinces), par dépression (ventouses), ou mixte, avec des fonctions complémentaires d’orientation, de centrage ou de contrôle de présence.
Nous disposons notamment d’un brevet sur un système de préhenseur intégrant un convoyeur, permettant d’assurer une prise et un transfert optimisés, tout en améliorant la cadence et la régularité des opérations dans la cellule.
Prise/dépose en flux continu
Selon l’application, la cellule peut être conçue pour réaliser des opérations de prise et de dépose en flux continu, sans arrêt des produits sur convoyeur. Le robot effectue alors une synchronisation dynamique avec le produit en mouvement via une fonction de tracking (suivi de pièce), permettant d’aligner trajectoire, vitesse et point de prise en temps réel. Cette approche améliore la cadence globale, réduit les temps morts liés à l’indexation, et assure une exploitation plus fluide lorsque la ligne amont/aval fonctionne en continu. Le tracking peut être basé sur un encodeur convoyeur et/ou une détection/vision, selon le niveau de précision et la variabilité des produits.
Peut être utilisée en association avec nos solutions informatiques.
CARACTERISTIQUES TECHNIQUES
| Pilotage & supervision | Automatisme + IHM (modes, réglages, comptages, alarmes, diagnostics, suivi production). |
| Robot | STAUBLI, KUKA, FANUC (Delta / SCARA / 6 axes) |
| Tracking convoyeur | Prise/dépose sur convoyeur en mouvement |
| Automatisme | SIEMENS |
| Energie | Électrique : 400V triphasée Pneumatique : Pression 6 Bars |
| Sécurité | Périphérie robot sécurisée (barrière, accès contrôlés) |